多域融合的协作式智能交通理论与方法

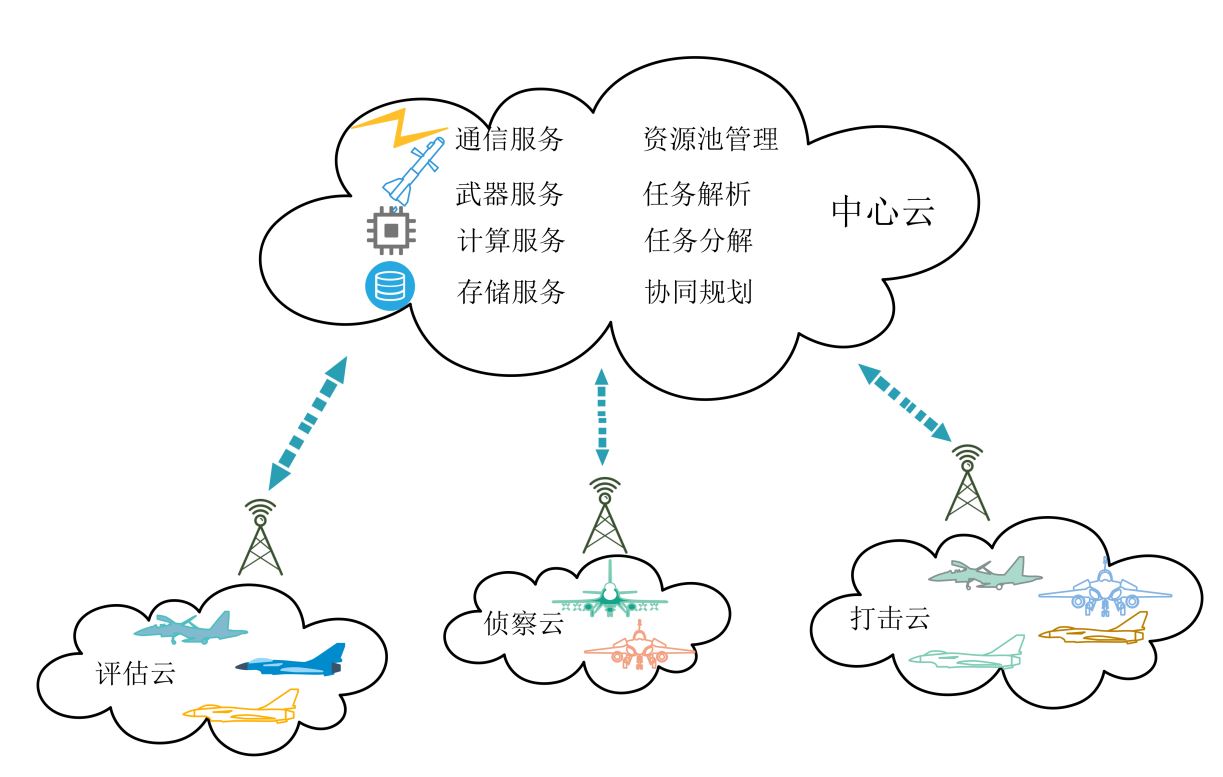
空天域可信群智能系统模型与核心机制
面向工业装备的实时智能系统技术研究
发表论文
[1] Kailong Zhang, Xiaowu Li, Ce Xie, Yujia Wang, Liuyang Li, Chao Fei, Arnaud de La Fortelle. A Scenario-Reconfigurable Simulator for Verifying Service-Oriented Cooperation Mechanisms and Policies of Connected Intelligent Vehicles, International Journal of Software Innovation, Vol.7, No.1, 2019.pp44-62
[2] Kailong Zhang, Ce Xie, Yujia Wang, Min Wang, Arnaud De La Fortelle, Weibin Zhang, Zongtao Duan. Service-Oriented Cooperation Policies for Intelligent Ground Vehicles Approaching Intersections, Applied Sciences, Vol.8, no.9, 2018.pp1647-1675;
[3] Kailong ZHANG, Ansheng YANG, Hang SU, Arnaud de LA FORTELLE, Kejian MIAO, Yuan YAO. Service-Oriented Cooperation Models and Mechanisms for Heterogeneous Driverless Vehicles at Continuous Static Critical Sections, IEEE Transactions on Intelligent Transportation Systems (Regular Paper), Volume:18, Issue:7, 2017.pp1867-1881
[4] Kailong ZHANG, Dafang ZHANG, Arnaud De La FORTELLE, Xiao WU, Jean GRéGOIRE, State-driven Priority Scheduling Mechanisms for Driverless Vehicles Approaching Intersections, IEEE Transactions on Intelligent Transportation Systems (Regular Paper), Vol:16(5), 2015.pp2487-2500
[5] Zhang Kailong, Wang Min, Su Hang, Yang Ansheng, Arnaud de La Fortelle, Miao Kejian. QoS-CITS: A simulator for service-oriented cooperative ITS of intelligent vehicles, 2017 IEEE/ACIS 16th International Conference on Computer and Information Science (ICIS2017), Wuhan, 24-26 May, 2017
[6] Kailong ZHANG, Ansheng Yang, Hang Su, Arnaud de La Fortelle, Xiao WU. Unified Modeling and Design of Reservation-based Cooperation Mechanisms for Intelligent Vehicles, IEEE 19th International Conference on Intelligent Transportation Systems (ITSC 2016), Rio de Janeiro, Brazil, November 1-4, 2016
[7] Zhang Kailong, Arnaud De La Fortelle , Zhang Dafang, Wu Xiao. Analysis and modeled design of one state-driven autonomous passing-through algorithm for driverless vehicles at intersections, 16th IEEE International Conference on Computational Science and Engineering (CSE 2013), 2013/12/3-2013/12/5, pp 751-757, Sydney, NSW, Australia, 2013
[1] Kailong Zhang, Liang Hu, Panfei Zuo, Xiao Wu, Kejian Miao, Yuan Yao, Wireless Extension Mechanism and Logic Design for FPGA-based Ethernet Powerlink Node, IEEE/ACIS ICIS 2016. Okayama, Japan, June, 2016.
[2] Zhang Kailong, Zhou Shaoli, Hu Liang, Su Hang, Wu Xiao, Miao, Kejian. Design and verification of heterogeneous streaming parallel mechanisms on Kepler CUDA, 13th IEEE International Conference on Pervasive Intelligence and Computing(PICom 2015),Liverpool, United kingdom, Oct, 2015.pp2256-2262
[3] Zhang Kailong, Li Jiwei, De La Fortelle Arnaud et al., Agent based adaptive cooperative models and mechanisms of multiple autonomous cyber-physical systems, 14th ACIS International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing (SNPD 2013), 2013/7/1- 2013/7/3, pp 159-164, Honolulu, HI, United states, 2013
[4] Zhang Kailong, Li Jiwei, Lu Zhou, Luo Mei, Wu Xiao. A scene-driven modeling reconfigurable hardware-in-loop simulation environment for the verification of an autonomous CPS, 5th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC 2013), 2013/8/26-2013/8/27, pp 446-451, Hangzhou, Zhejiang, China, 2013
[5] Zhang Kailong, Yao Yuan, Lu Zhou, Wu Xiao, Labanni Ouassila. A new universal-environment adaptive multiprocessor scheduler for autonomous cyber-physical system, IEEE/ACIS 11th International Conference on Computer and Information Science (ICIS 2012), 2012/5/30-2012/6/1, pp 373-378, Shanghai, China, 2012m
科研项目
2018年,***,西安航空计算技术研究所;
2018年,新型高效空间计算技术研究, 航天八院"十三五"预研项目(航天基金子课题);
2017年,城市服务域多无人车的协同规划模型与控制方法,中央高校基础研究基金(3102017zy022);
2017年,机载航电系统计算资源动态管理技术研究,航空基金(20171953016);
2016年,时空-服务域多无人车自主行为协同模型与关键机制研究, 国家自然科学基金面上项目(61572403);
2015年,信息物理融合的智能车优先级自适应协作模型与方法,中央高校基础研究基金(3102015JSJ0102);
2012年,多形态嵌入式系统智能化实时服务模型及实现方法,国家自然科学基金青年课题(61103004);
2010年,面向装备物联的网络化嵌入式软件平台, 陕西省“13115”科技创新工程重大科技专项(ZDKG-83);
2007年,面向智能工业缝制设备的可定制嵌入式软件, 陕西省科技计划项目;